Présentation¶
- Auteur
J.Soranzo et Gilles
- Societe
- Entity
- Dépôts Bitbucket
- Date de création
08/2021
- Date dernière maj
04/05/204
Introduction¶
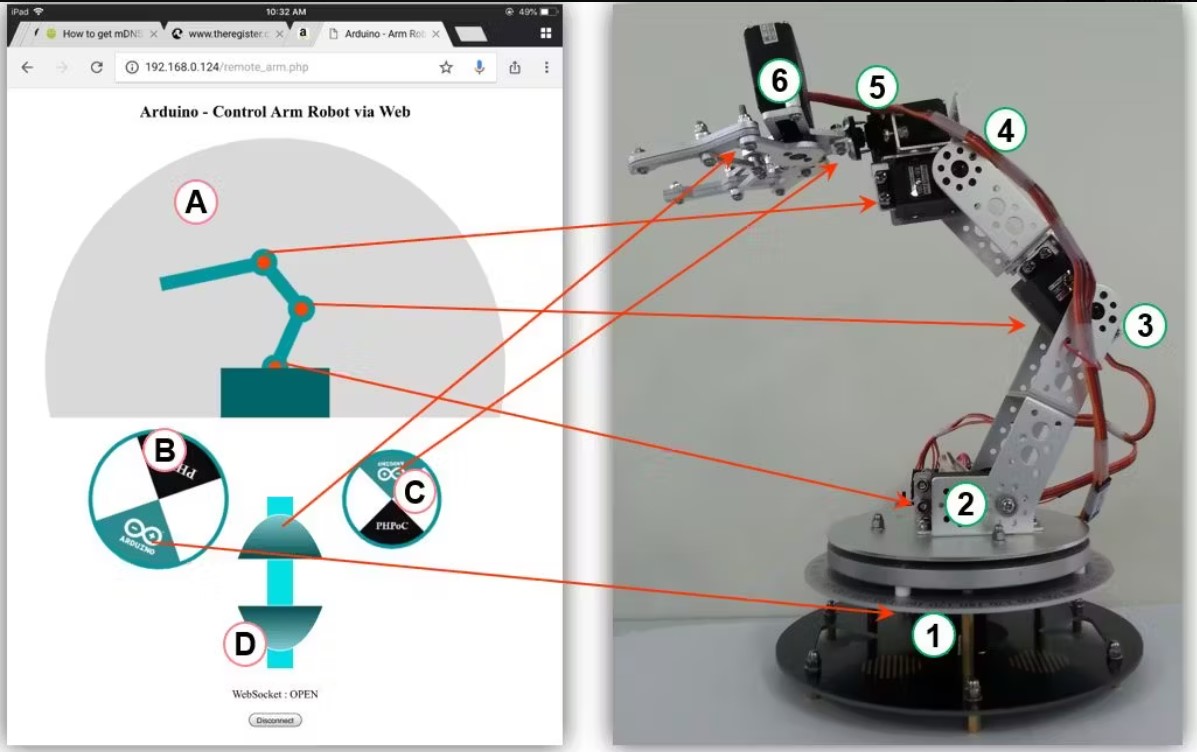
L’idée est de reprendre le projet Arduino - Control Arm Robot via Web 4 sur Hackster.io et d’essayer de le faire tourner sans la carte PHPoc pour piloter le projet Bras manipulateur 5
En plus de cela, on souhaite pouvoir piloter le bras avec l’interface Android du projet Bras manipulateur Vorobotics 3
Fichiers apk à installer sous Androids
Dossier robotArm dans 01-maquettageFaisabilite\robotArm
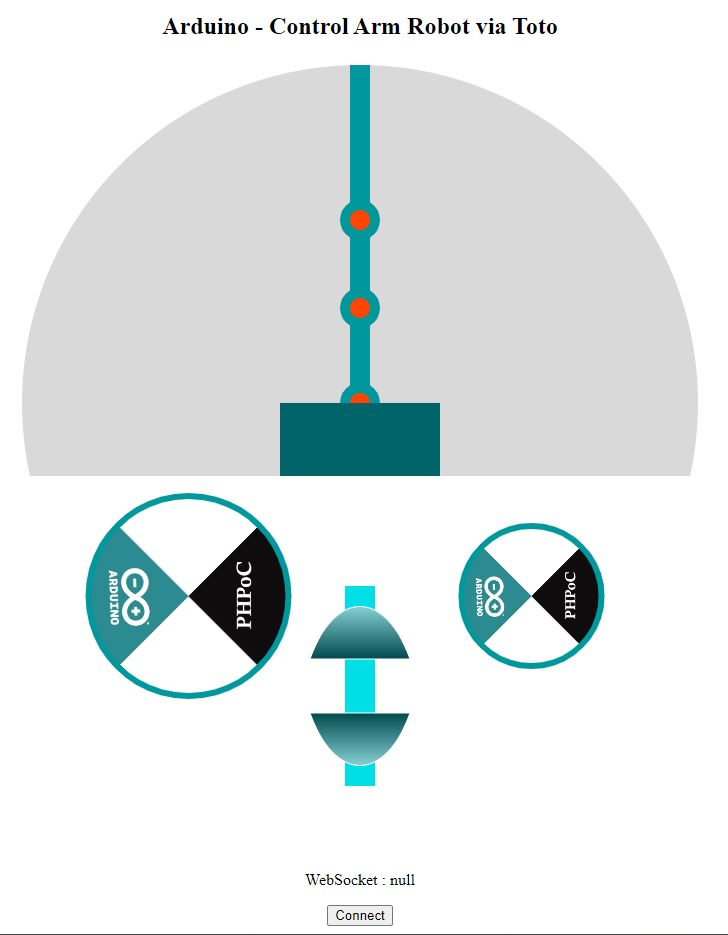
Reverse de robotArm.html¶
17/12/2022 : google drive : pdf exporté de SCRIBZEE
Pour connaître les détails de ce reverse voir le Document sous Google Drive 6
En résumé: un grand script en javascript à la fin duquel on a windows.onload = init et setTimeout( 500ms, update_view)
Tout se passe dans la balise html canvas 8 dont l’id est servo. Canvas s’utilise avec l’API webGL ou l’API canvas 7
En dessous juste une balise p pour rappeler l’état de la connexion + un bouton pour établir
la connexion. La connexion est gérée également par le javascript. onclick="wc_onclick()
Mise en oeuvre (synthèse)¶
Au 30/09/2023
dans un premier temps (sans l’alim labo), alimentation de la carte ARDUINO UNO par le cable de debug liaison réservée au debug et au téléchargement du firmware.
connexion liaison softserial (FTDI) est la connexion avec serveur
Alim labo version PC connecté à la carte ADAFRUIT (n’alimente pas l’ARDUINO en 5V)
2 modes : par défaut on démarre en mode appInventor (avec pilotage Android)
lancer le serveur cf chapitre serveur, lancer le navigateur
firmware : 0021_brasRobot_webGUI\projet\_02-realisation\bras2023arduinocodes
Serveur : 0021_brasRobot_webGUI\projet\_02-realisation\brasrobot2023serveur
Architecture¶
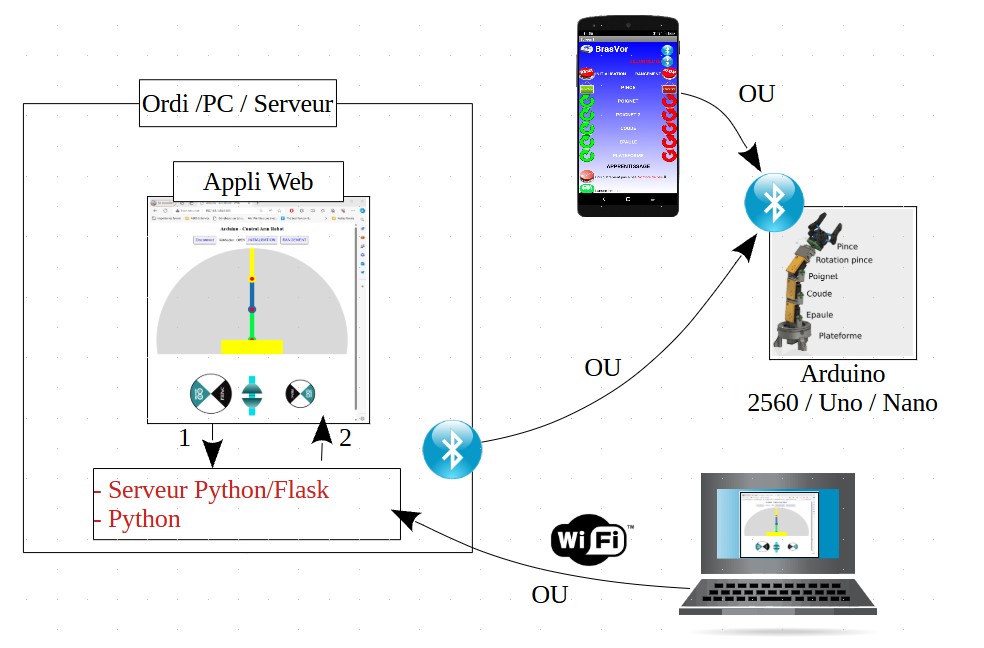
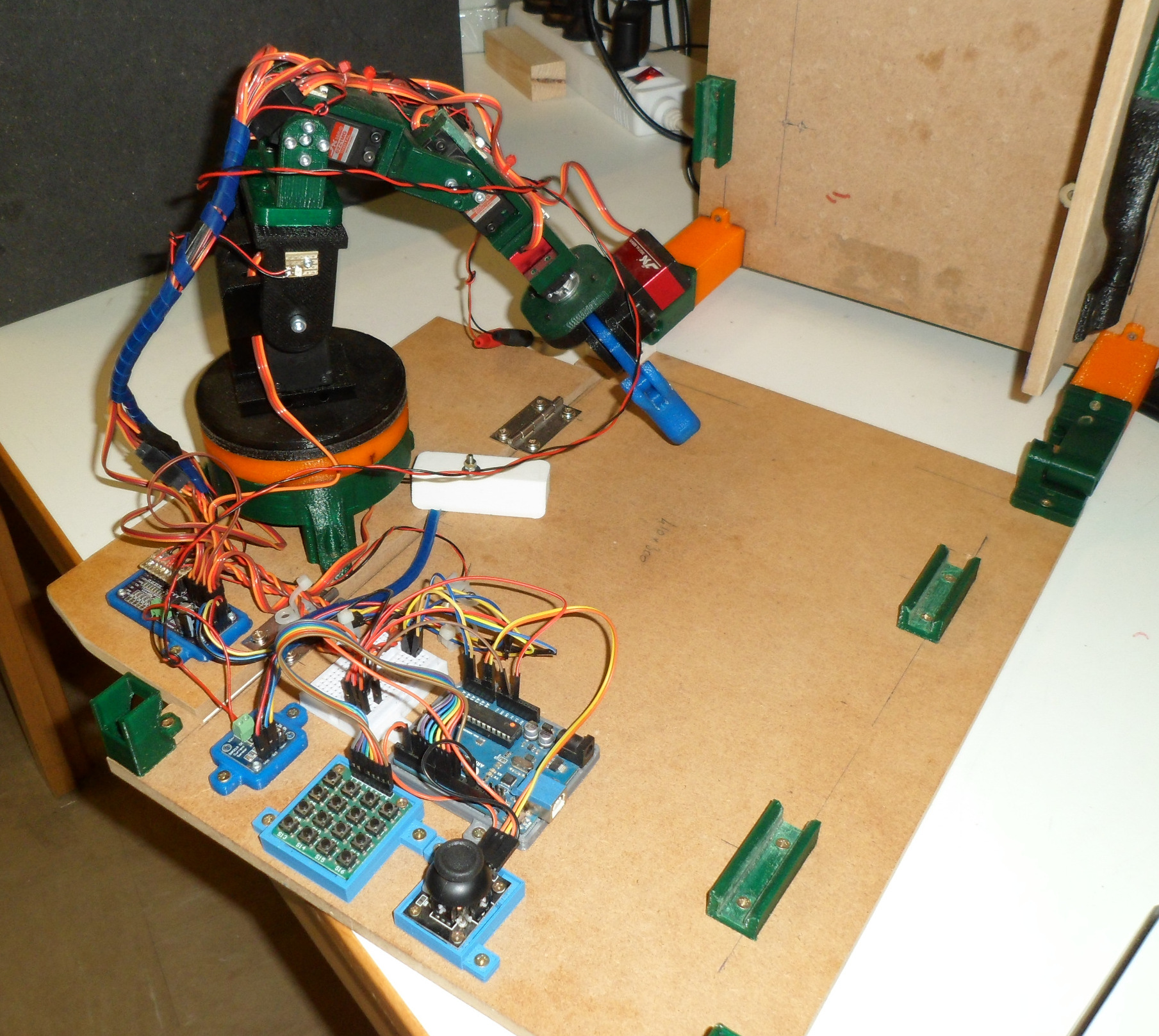
Au niveau de l’ARDUINO, la communication avec le BT se fait via le port série 1 de la carte ARDUINO 2560 (passage à la 2560 le 30/09/23)
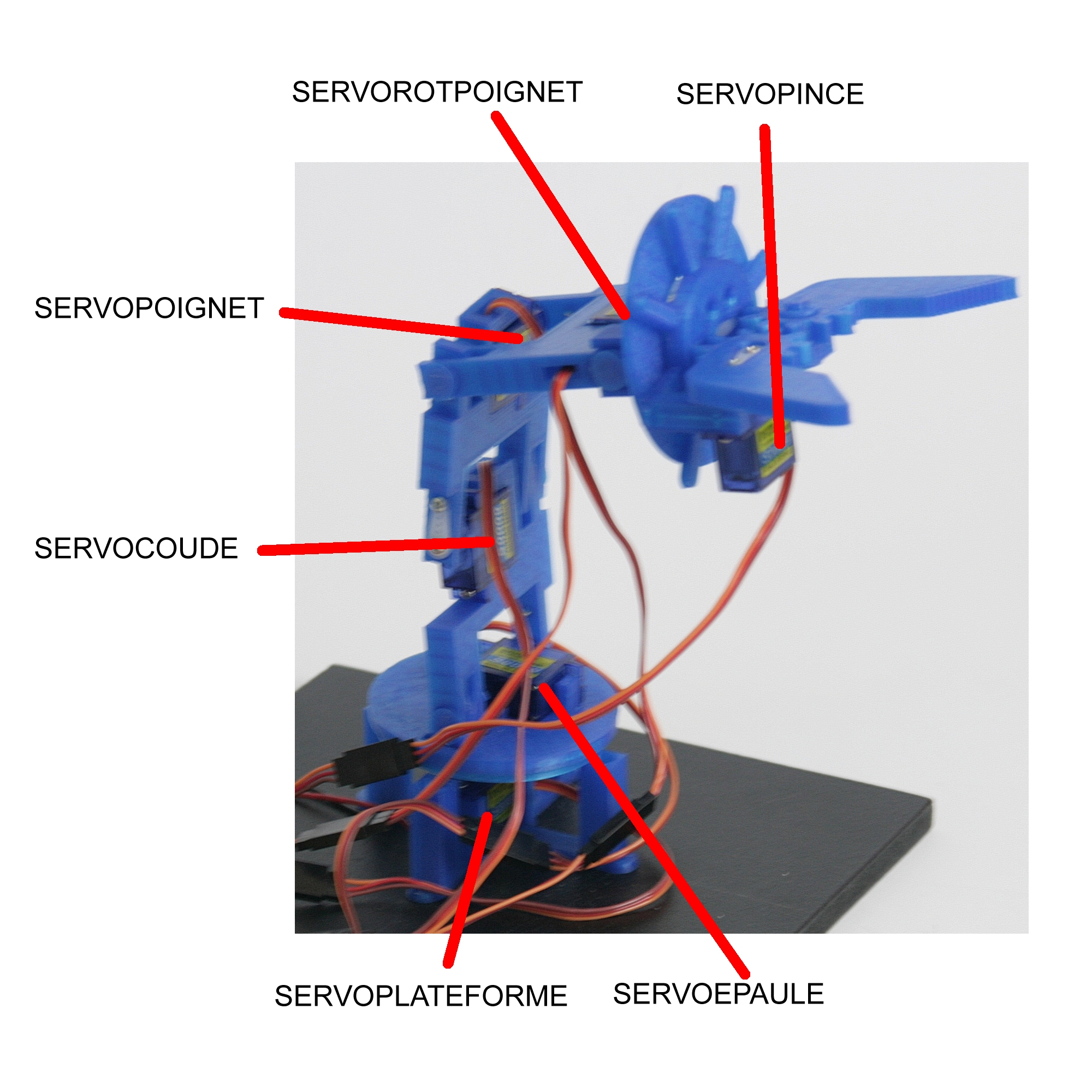
Les servo moteur sont pilotés par une carte ADAFRUIT cf. le projet Bras manipulateur 5
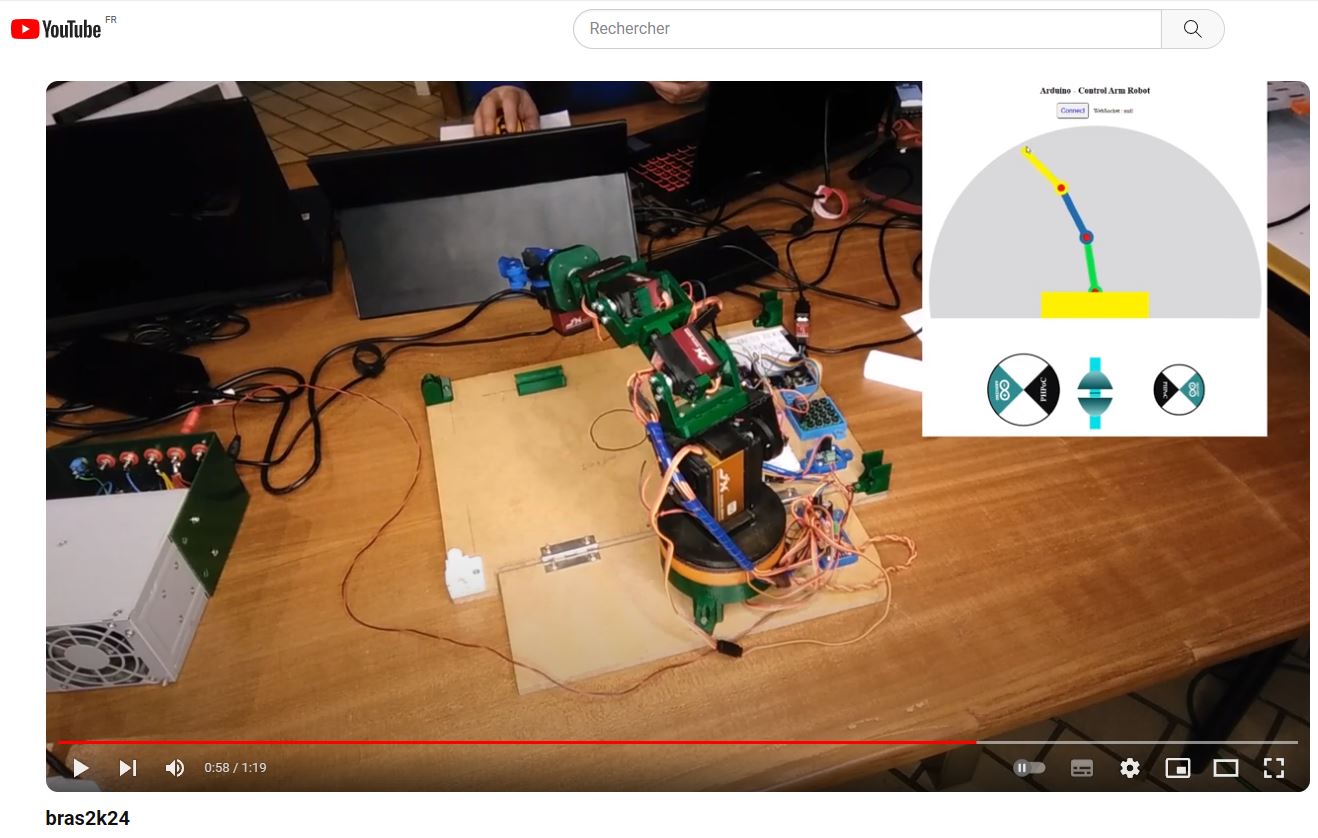
2 architectures hardware utilisées : bras “Gilles” et bras mallette 60kg 10
Dépôts git sur Bitbucket¶
Dans l’espace de travail sur Bitbucket (lien ci-dessus), on trouve:
doc source
arduinocode
serveur
doc bitbucket io
Note
make.bat ajouté au gitignore à cause du lien relatif vers webdoc
Pour aller plus loin¶
Mechaduino¶
C:\MountWD\Donnees\ODJ\008_iao_wrk\VoRoboticsAsso\00-RobotsEtRobotique\01-Motricite\Moteurs\steperMotor\Mechaduino
Mechaduino - Powerful open-source industrial servo motor. 14 l’ancien Kickstarter
Manuel utilisateur de 32 pages fourni sur le site
See also
SITE DE COMMERCE
Servo42C 42-Pilote de moteur pas à pas en boucle fermée 15 clone pas tout à fait identique mais moins cher 15.8€ ald 49€
Caution
VIDEO
Il y a même une vidéo ! The comparison test of MKS SERVO42C 42B , BTT S42B and TMC2209 17
Warning
IL N’Y A PAS LE SOURCE DU FIRMWARE
Pour aller beaucoup plus loin…¶


Weblinks¶
- 1
- 2(1,2)
- 3
https://www.vorobotics.com/wiki/index.php?title=Bras_manipulateur#BrasVor_V2.00
- 4
https://www.hackster.io/phpoc_man/arduino-control-arm-robot-via-web-379ef3
- 5(1,2)
https://www.vorobotics.com/wiki/index.php?title=Bras_manipulateur
- 6
https://docs.google.com/document/d/1wsuOK_mgY6OmYvE6DigklwnC0aIPzKaFCs2rAurfOVg/edit#
- 7
- 8
https://developer.mozilla.org/fr/docs/Web/HTML/Element/canvas
- 9
- 10
https://www.vorobotics.com/wiki/index.php?title=Bras_Robot_Educatif
- 11
- 12
- 13
- 14
https://www.kickstarter.com/projects/tropicallabs/mechaduino-powerful-open-source-industrial-servo-m
- 15
- 16
- 17
- 18
- 19
- 20
- 21
https://www.bcn3d.com/bcn3d-moveo-the-future-of-learning-robotic-arm/